语言

 z-bio
z-bio
 2025-07-16
2025-07-16
 4569
4569
上周,Science 旗下机器人领域顶刊《Science Robotics》最新一期封面文章发表重磅成果:约翰霍普金斯大学团队的手术机器人 SRT-H(Hierarchical Surgical Robot Transformer),独立完成了 8 例胆囊切除术的关键步骤,成功率 100%!
有网友问道:“外科医生要被取代了?”
外科医生er表示:一点不慌……
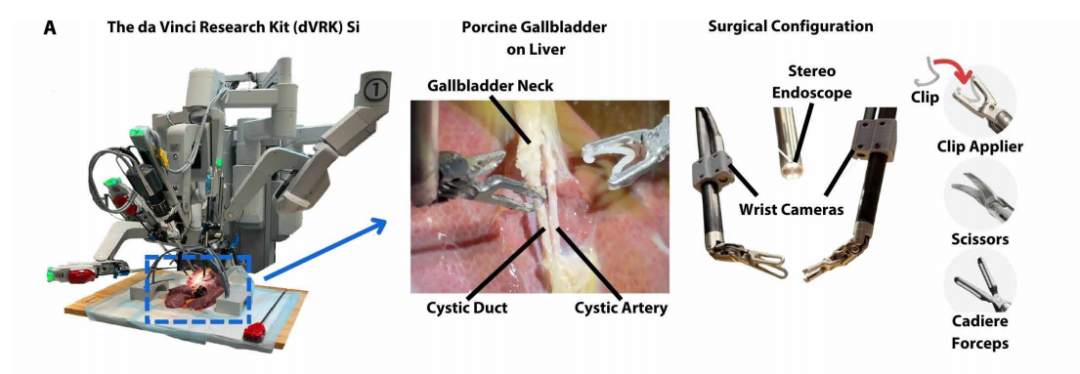
值得注意的是,SRT-H 并非从硬件层面完全创新,而是基于直觉外科公司的 da Vinci Si 手术机器人改装的 da Vinci Research Kit(dVRK)Si 双机械臂系统。
其核心突破在于软件与人工智能架构:通过语言引导的模仿学习框架,从人类手术视频中 “学习” 流程,并依托分层控制体系实现自主决策 —— 简单来说,它像一位 “机器人外科医生”,既能理解手术情景,又能自主规划并执行动作。
分层控制与语言驱动的 “外科思维”
这篇研究面临的难点堪称 “层层关卡”。
首先,真实手术中的组织在外观、解剖结构和形态上存在巨大差异,比如胆管和动脉的直径、长度、间距等都可能不同,这对机器人的感知能力是极大考验。
那么,SRT-H 是如何突破这些难点的?其核心创新在于分层架构与语言条件模仿学习的结合。
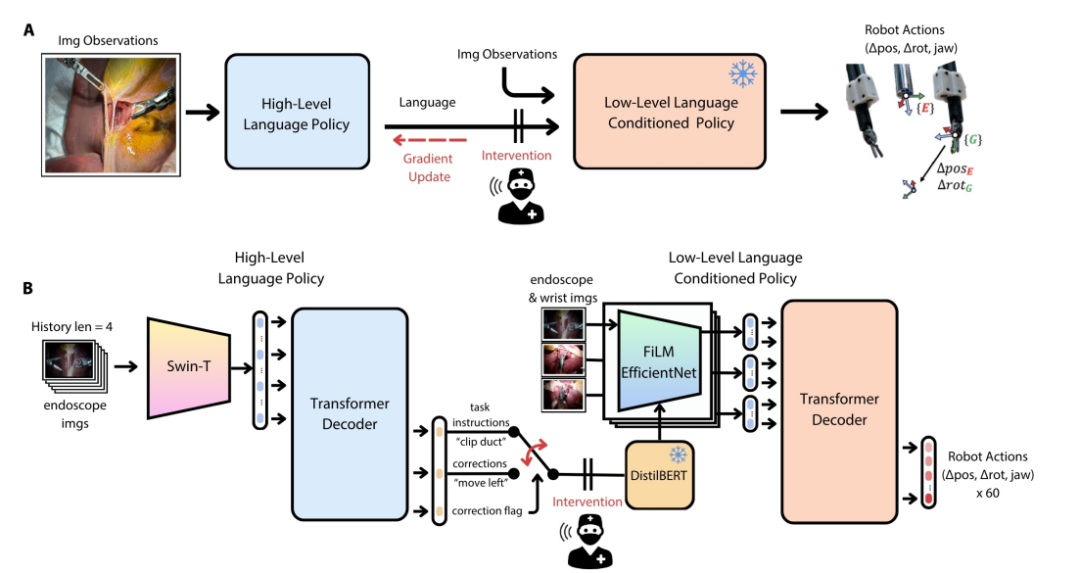
其高层(HL)控制模块类似 “指挥官”,基于与 ChatGPT 同源的大型 Transformer 模型,能以自然语言生成任务指令(如 “夹闭胆囊管”)和纠正指令(如 “左移机械臂重新夹取”)。这些指令不仅规划手术步骤,还能在低层执行出错时实时纠错。低层(LL)控制模块则像 “执行者”,接收语言指令后生成具体运动轨迹,控制机械臂完成抓取、夹闭、切割等精细操作。
这种设计的巧妙之处在于语言的 “桥梁作用”:语言不仅是高低层沟通的媒介,还为人类干预提供了直观接口 —— 医生可随时用自然语言调整操作,而这些干预会通过 DAgger 风格的循环被系统 “记住”,用于持续学习优化。
更难得的是,SRT-H 仅依靠普通 RGB 图像训练,无需深度传感器或复杂分割模块,大大降低了临床转化的硬件门槛。
SRT-H 表现如何?
SRT-H 在 8 个全新离体猪胆囊上自主完成了所有 17 项任务,成功率达 100%,平均每例手术约 5 分 17 秒,还能自主纠正约 6 次错误。对比其他变体,比如没有高层 DAgger 数据或缺少腕部相机的版本,SRT-H 在成功率和恢复能力上都显著更优,这印证了分层设计和腕部相机的重要性。
17 步精准操作如何实现?
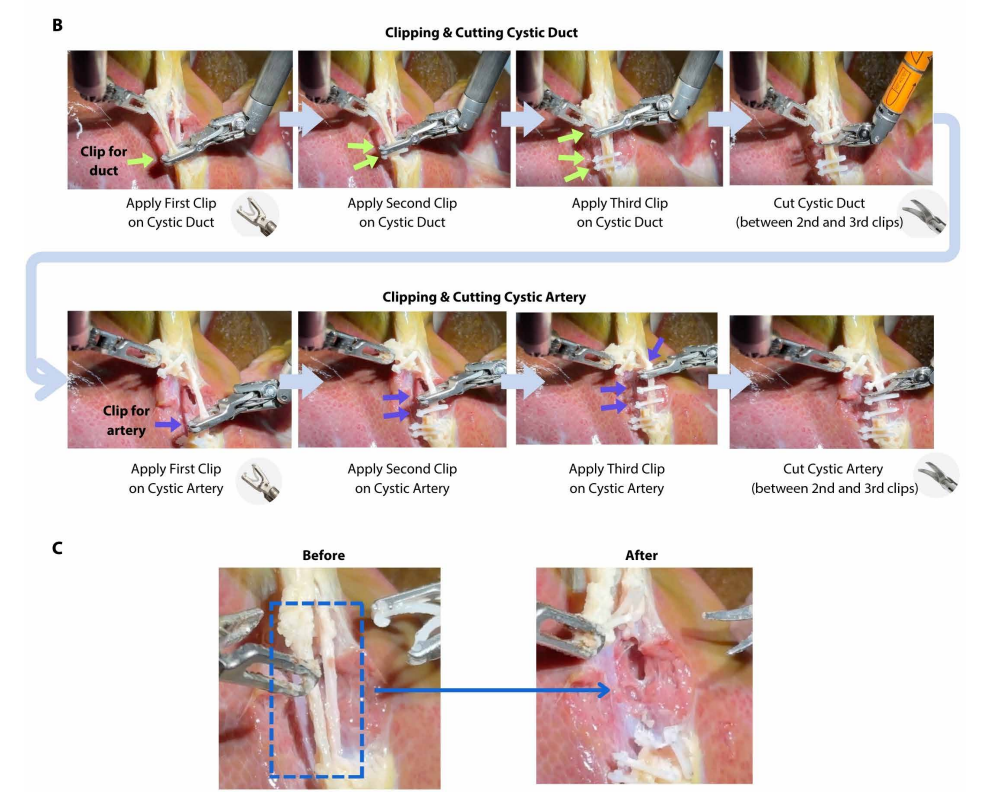
在胆囊切除实验中,SRT-H 执行的是手术中最关键的阶段 —— 将胆囊从肝脏分离并切除,包含 17 个连续步骤,每一步都体现着自主决策的精准性:
识别解剖结构:通过内置摄像系统,机器人能根据组织颜色、形态差异,自动定位胆囊与肝脏的分界、胆囊管、动脉等关键结构,哪怕不同样本的胆管直径、动脉间距差异显著,也能准确识别。
精准抓取与牵引:按照手术规范,机械臂用抓钳抓住胆囊底部并提拉,拉紧组织以暴露管道和血管。若初始抓取位置偏差,机器人会自主调整重新定位,确保牵引稳定 —— 这一步需要精细的双手协调,类似人类医生 “左手固定、右手操作” 的逻辑。
闭合血管与管道:机器人需在胆囊管和动脉的特定位置放置 6 个钛夹。它严格遵循手术规范,依次在正确位置夹闭,每放一个夹子都会通过视觉验证位置,若偏差则立即调整,确保 “不夹错、不遗漏”。
剪断与摘除胆囊:夹闭完成后,机器人操纵微型剪刀沿预定切口线分离胆囊与肝脏,过程中实时监测周围组织,避免伤及肝脏等邻近结构。最终,胆囊被完整游离,整个过程无需人工介入。
与人类专家(约 12-19 秒 / 子任务)相比,SRT-H 虽然完成任务慢 30%-60%,但轨迹更短、抖动更小,动作更平稳。这意味着它在精准性和一致性上有独特优势,未来或许能成为外科医生的得力助手,尤其在重复操作或人力短缺的场景中发挥作用。
离临床应用还有多远?
说近也近,说远也远。
目前 SRT-H 只在 “离体胆囊” 上练过 —— 就是已经离开身体的组织,没血流、不呼吸、器官不动,相当于在 “静态模型” 上做手术。但真给活人做,麻烦就多了:器官会跟着呼吸心跳动,可能突然出血糊住视野,甚至病人的解剖结构跟 “教科书” 长得完全不一样(比如胆囊管绕着动脉走)。
为啥它先练胆囊切除?因为胆囊的 “长相” 相对规矩,步骤也固定;要是换个阑尾手术,有时候找阑尾都得花几小时,机器人现在还搞不定。而且它现在只做了 “夹夹子 + 切断”,像剥离胆囊、止血这些复杂步骤还没练过呢。
就算以后练全了步骤,还得闯两关:一是能不能处理各种意外(比如突然大出血),二是伦理和信任 —— 万一机器人切错了,算谁的责任?就像现在的智能驾驶,理论上很牛,但你敢完全撒手让它开吗?
不过研究团队乐观预测,随着技术成熟,10 年内有望开展小规模人体试验。短期内,自主机器人仍局限于实验室,临床主流仍是 “人控机器人辅助手术”;但长期来看,其适应能力与安全性将逐步提升。
回到最初的问题,机器人会取代外科医生吗?
现在看,更可能是 “合作模式”。
现在的机器人已经能帮医生减少助手数量了;以后,机器人或许能全包 “拉钩、暴露视野、夹东西” 这些辅助活,医生专心做关键决策。
助手岗位可能会被取代,但主刀医生反而更重要 —— 毕竟,判断 “要不要切”“怎么切才安全”,还得靠人。就像现在的厨师,助手可能被机器取代,但掌勺的大厨,永远是灵魂。